倒數鬧鐘
模擬一個計時器,扭動電位器調較時間,倒數完成後發出聲效提醒。

組裝說明書
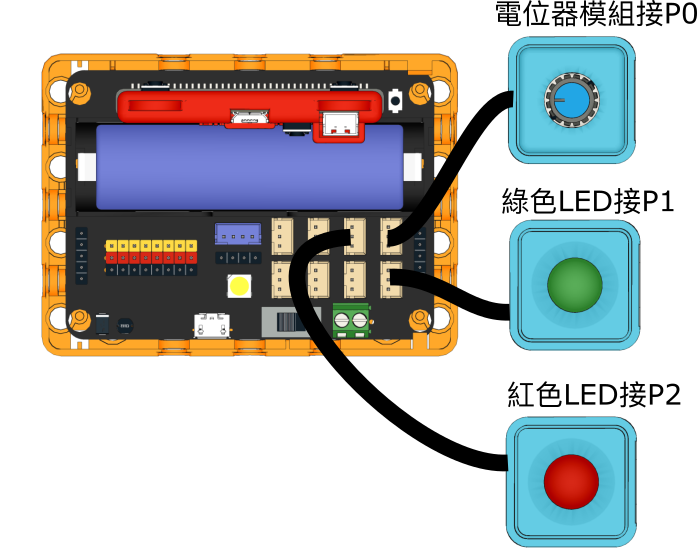
參考接線
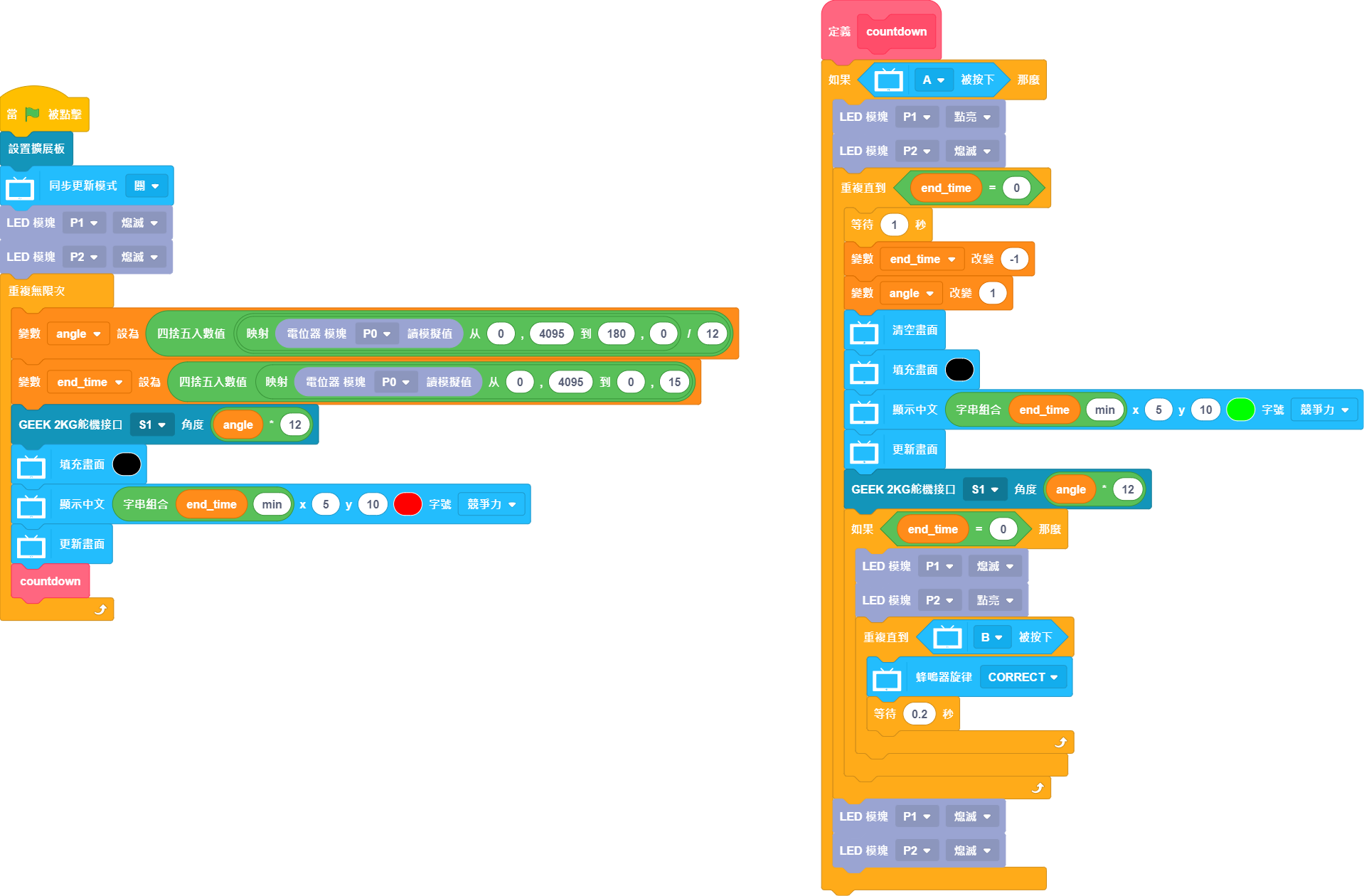
參考程式
KittenBlock參考程式
Python參考程式
#/bin/python
from time import sleep
from future import *
from sugar import *
import robotbit
angle = 0
end_time = 0
z = 0
def countdown():
global angle,end_time,z
if sensor.btnValue('a'):
LED("P1").state('ON')
LED("P2").state('OFF')
while not (end_time == 0):
sleep(1)
end_time += -1
angle += 1
screen.clear()
screen.fill((0, 0, 0))
screen.textCh(str(end_time)+str("min"),5,10,2,(0, 255, 0))
screen.refresh()
robot.geekServo2kg(1, angle * 12)
if end_time == 0:
LED("P1").state('OFF')
LED("P2").state('ON')
while not sensor.btnValue('b'):
buzzer.melody(CORRECT)
sleep(0.2)
LED("P1").state('OFF')
LED("P2").state('OFF')
def valmap(x, in_min, in_max, out_min, out_max):
return int((x-in_min) * (out_max-out_min) / (in_max-in_min) + out_min)
robot = robotbit.RobotBit()
screen.sync = 0
LED("P1").state('OFF')
LED("P2").state('OFF')
while True:
angle = (round(valmap(Angle("P0").value(), 0, 4095, 180, 0) / 12))
end_time = (round(valmap(Angle("P0").value(), 0, 4095, 0, 15)))
robot.geekServo2kg(1, angle * 12)
screen.fill((0, 0, 0))
screen.textCh(str(end_time)+str("min"),5,10,2,(255, 0, 0))
screen.refresh()
countdown()
模型玩法
扭動電位器調較時間,決定後按A開始,倒數完成後按B停止響鬧。