Robotbit 在Kittenblock編程
Robotbit亦支援在Kittenblock上編程。
有關Kittenblock的介紹可以參考:Kittenblock大全
這教學會使用Micro:bit V1或V2作例子,有關未來板或Meowbit的Robotbit Edu使用教學請參考相關的教學。
Kittenblock編程

首先將Microbit用USB線連接到電腦。
在左上角小貓logo旁邊的硬件欄選擇硬件,加載Robotbit的插件。
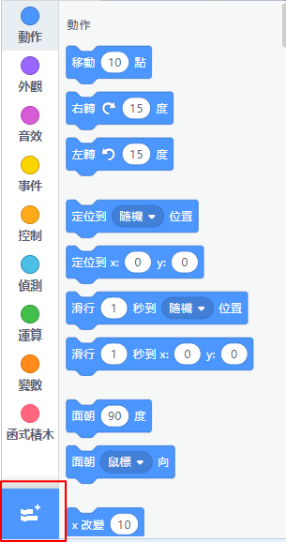
在Microbit的積木欄中按下感嘆號 ( ! ) 按鈕。

然後點選『開始連線』。

連接完成!

成功連接後,MicroBit會顯示心形。
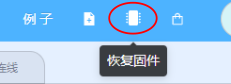
假如沒有顯示心形,可以按下升級韌體。
加載成功

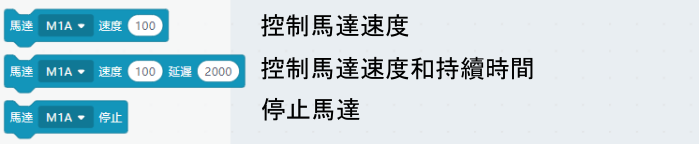
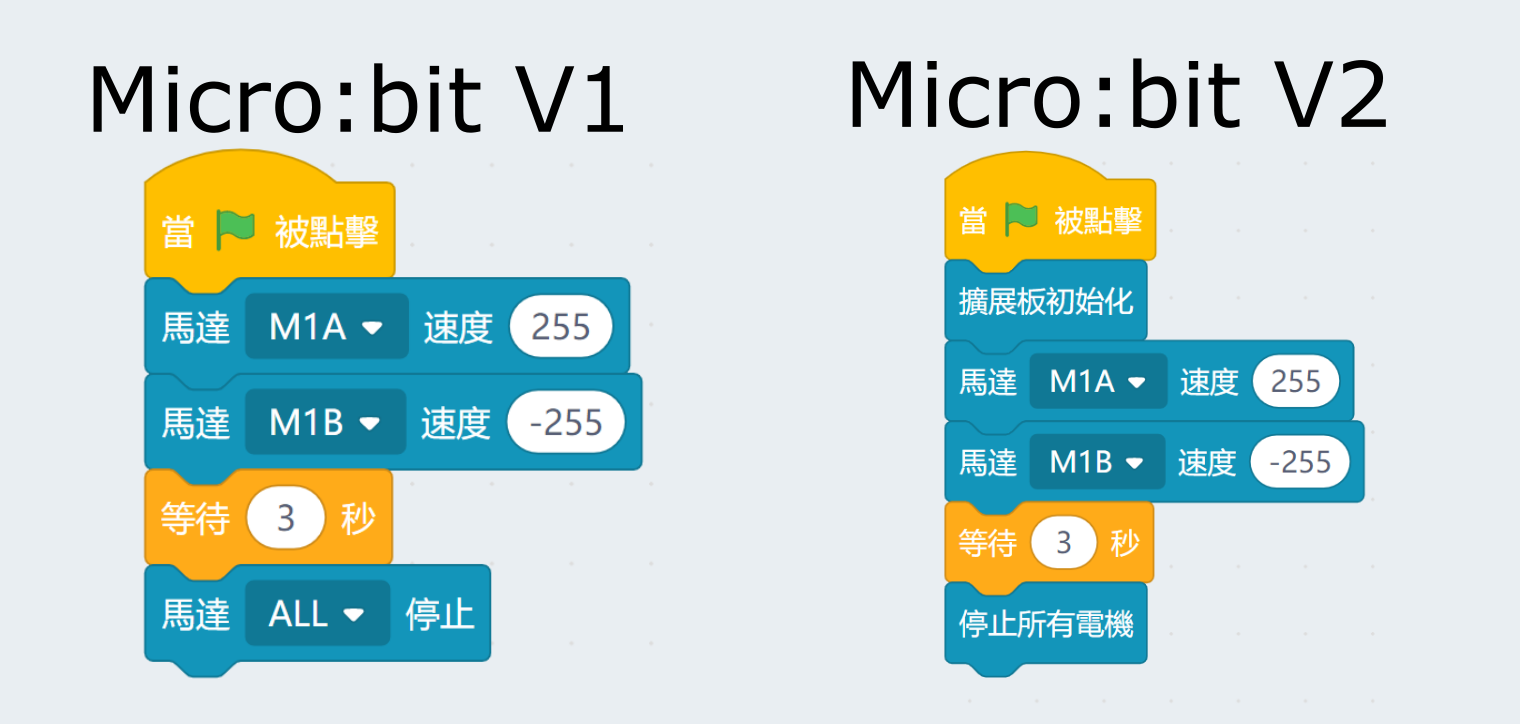
1. 電機編程
Kittenbot每款電機的詳細教學可以參考:電機教學
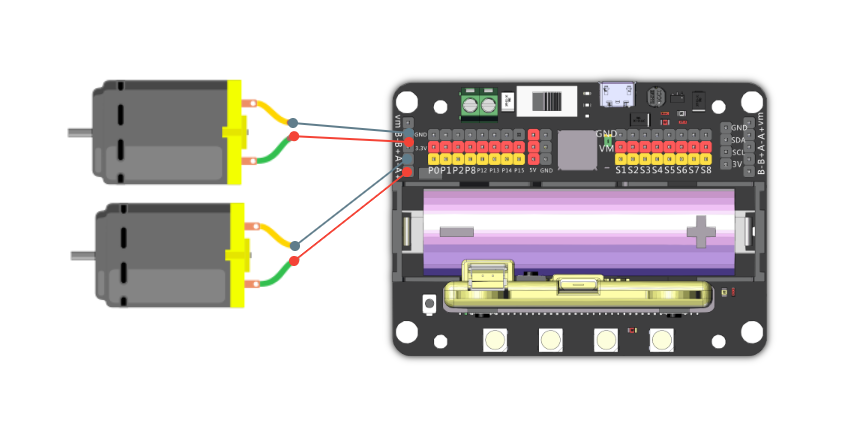
示範接線與編程:
將電機連接在robotbit的M1A和M1B上。
電機速度範圍由-255至255
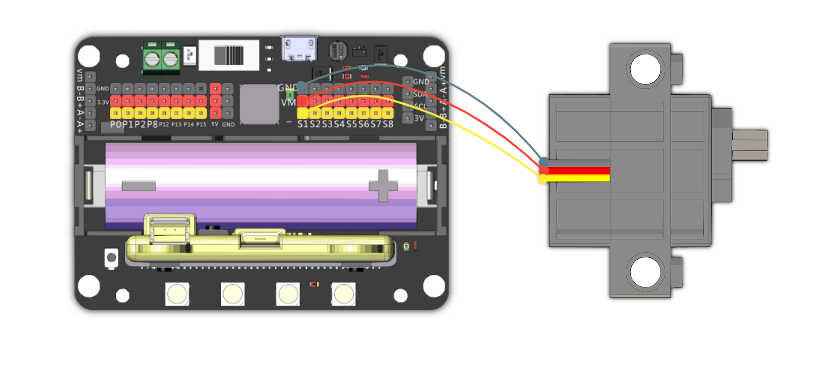
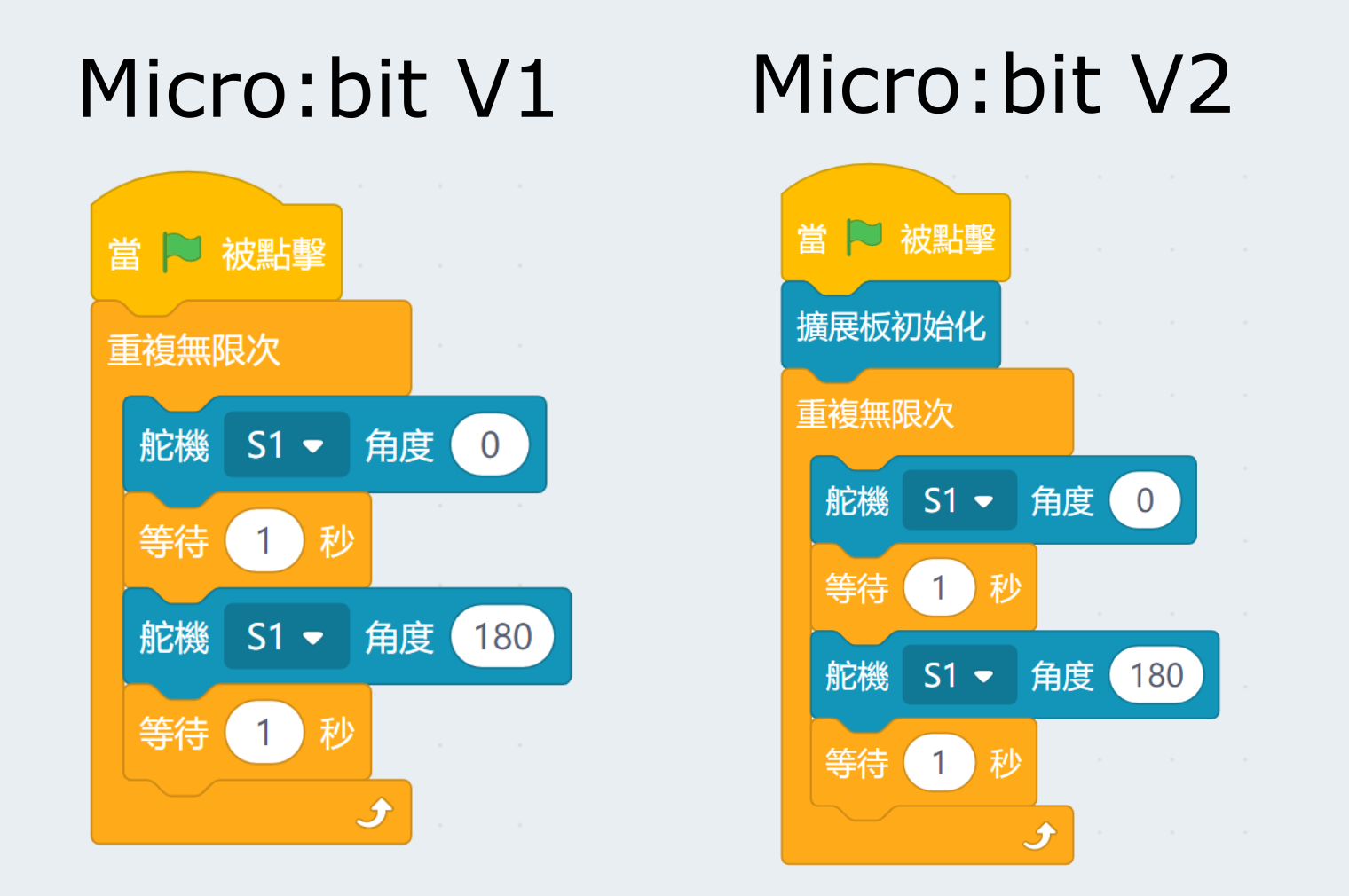
2. 舵機編程
Kittenbot每款舵機的詳細教學可以參考:舵機教學
示範接線與編程:
將舵機連接在Robotbit的S1上。
將舵機的橙色線接到黃色引腳針線,紅色線接到紅色正極針線,黑色線接到黑色負極針線。
由於舵機轉動需要時間,所以我們需要加一個短暫的停頓(pause),給予舵機足夠時間轉動。
一般舵機的轉向角度範圍由0至180度
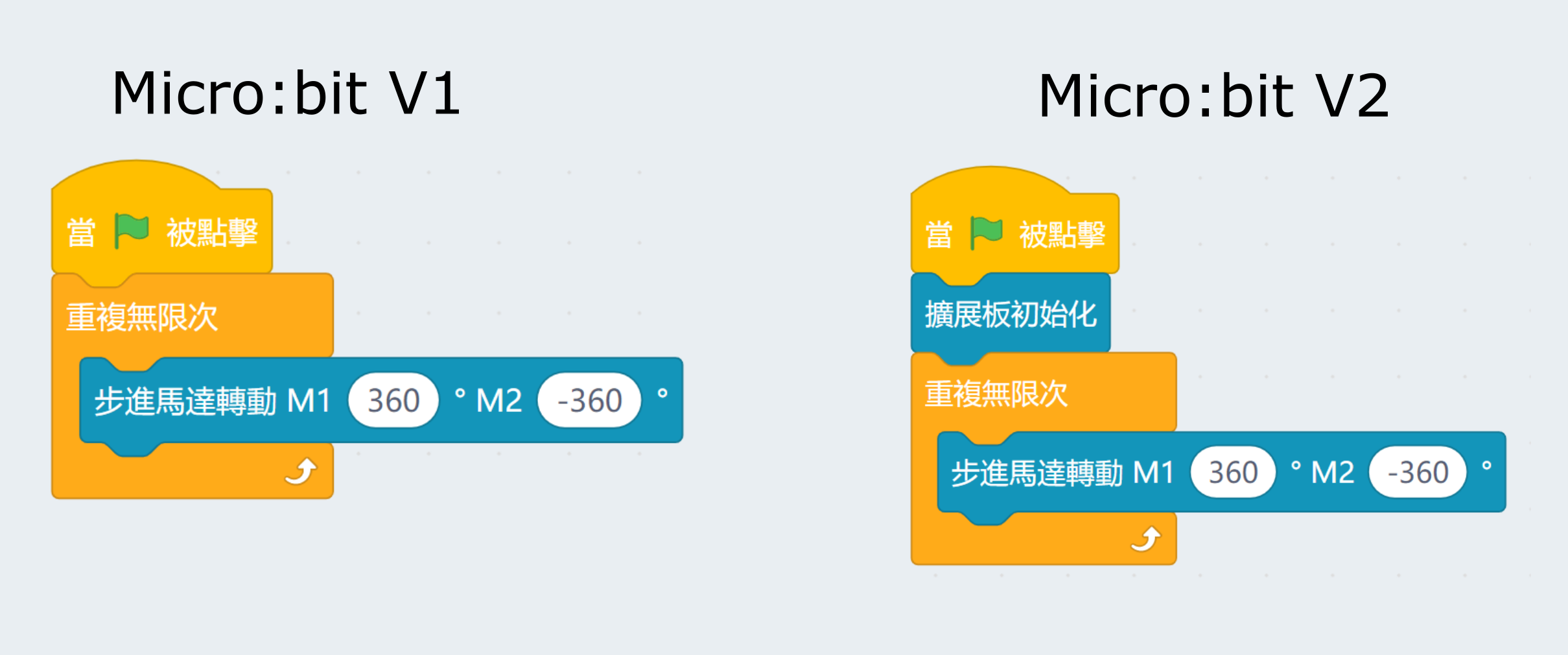
3. 步進電機編程
Kittenbot每款電機的詳細教學可以參考:電機教學
示範接線與編程:
將步進電機連接到Robotbit的M1和M2上(將紅色電線連接到VM)。
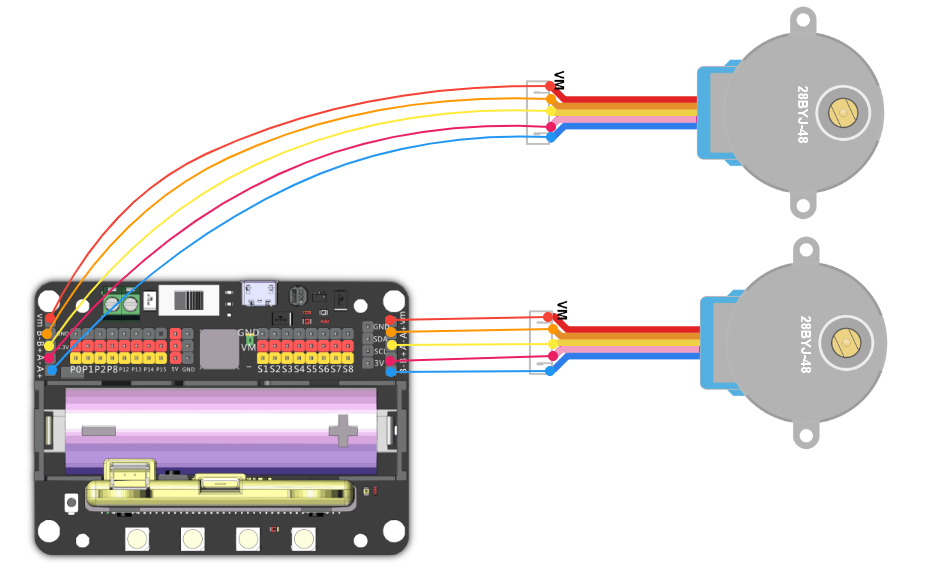
步進電機的角度範圍為-360至360度
4. 蜂鳴器編程
使用蜂鳴器時,不可以拔除P0的Jumper線帽。
5. RGB燈編程
所有積木都需要加一個”顯示”的積木才會顯示效果。
5.1 4顆燈同時點亮

5.2 使用RGB數值指定顏色
RGB的數值範圍由0-255。

5.3 點亮指定一顆燈
燈的編號由0至3。(Robotbit上也印有編號)
![]()

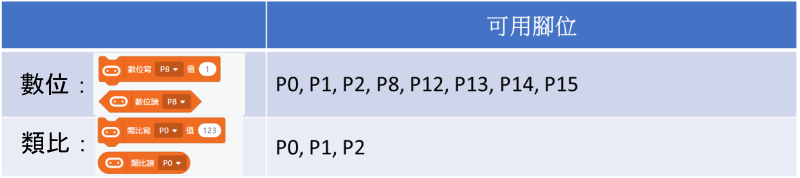
6. 引腳編程
引腳的讀寫需要用到Microbit的積木塊。

Pin 0-2可以用作類比引腳,其他Pin只可以用作數位引腳。
類比數值範圍由0-1023,數位數值範圍由0至1。
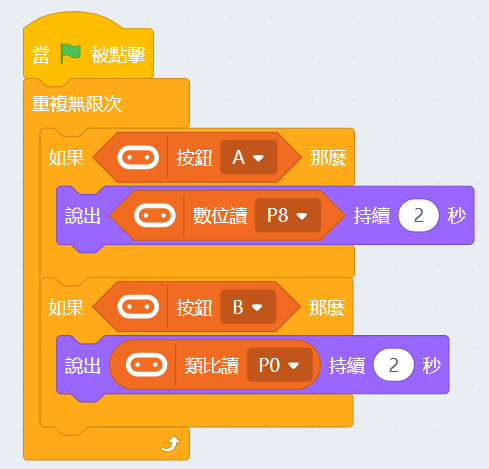
6.1 引腳數值讀取
Pin 0預設與蜂鳴器相接,所以使用Pin 0引腳時需要拔除跳線帽。
6.2 引腳數值寫入
Pin 0預設與蜂鳴器相接,所以使用Pin 0引腳時需要拔除跳線帽。
