工業4.0機械臂
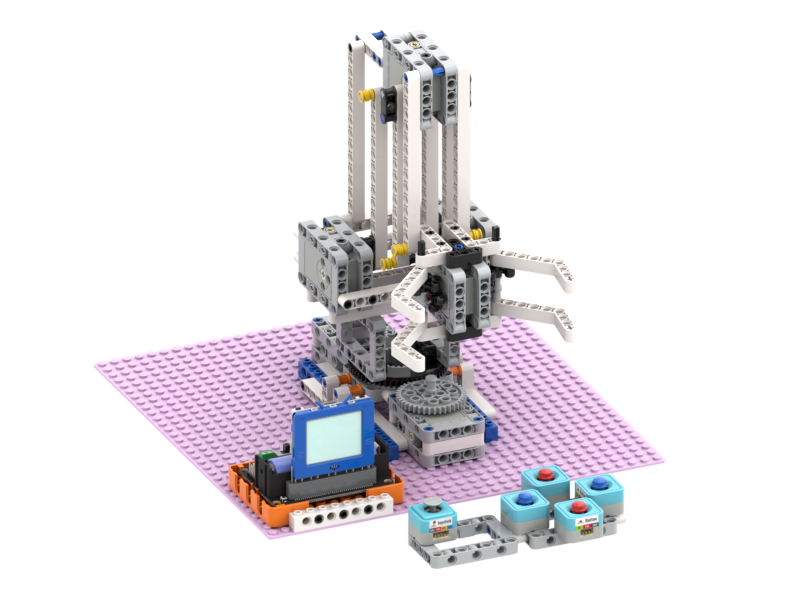
工業4.0機械臂是一套機械套件,套件可以搭建出一隻以5隻Geekservo 2KG舵機驅動的活動機械臂。
套件內容
Robotbit Edu x1
18650鋰電池 x1
Geekservo 2KG舵機 x5
Sugar 按鍵模組 x4
Sugar 搖桿模組 x1
積木包
連接線
套件特色
採用2KG舵機,確保機械臂運作更加穩定可靠
機械結構讓學生了解機械臂例如槓桿力學等的機械工程知識
動手搭建,讓學生動手組裝機械臂,提升工程技能
採用積木結構,靈活改裝適合不同應用
組裝教學
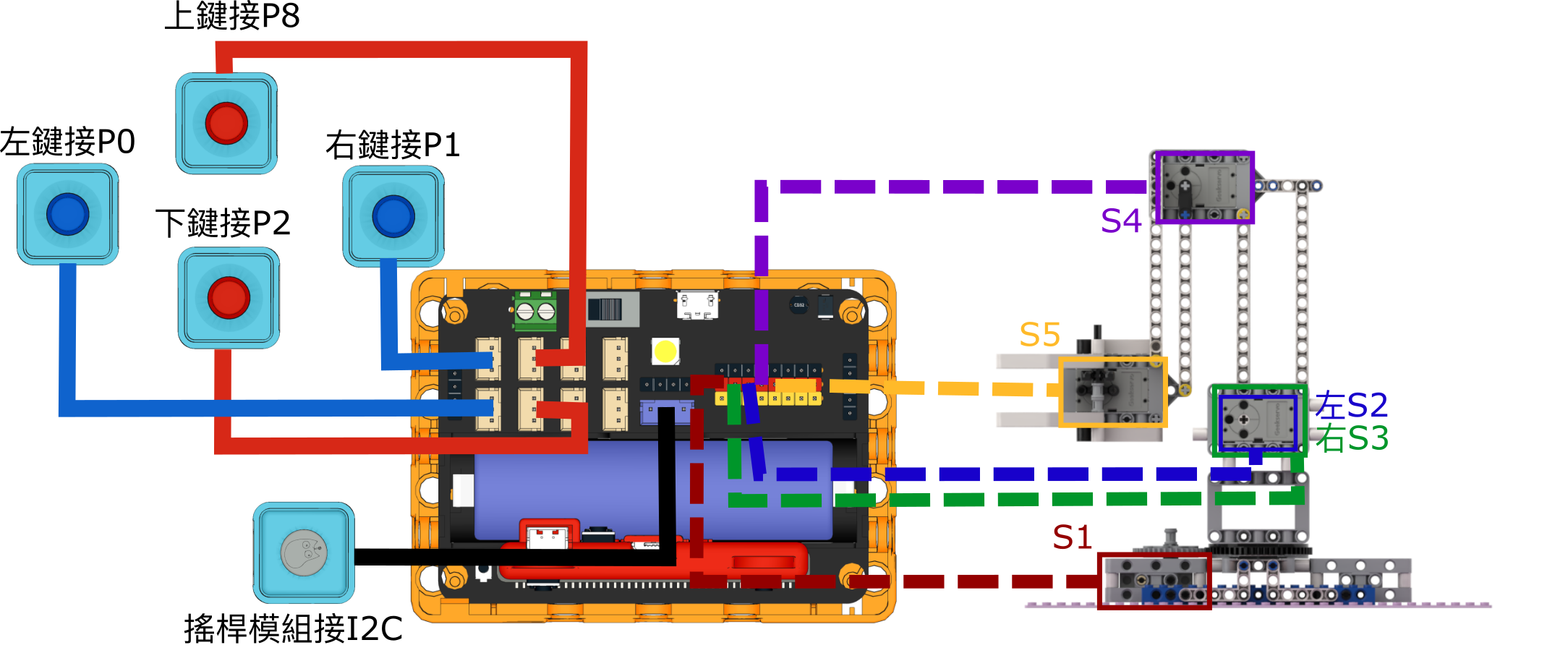
參考接線
Robotbit EDU
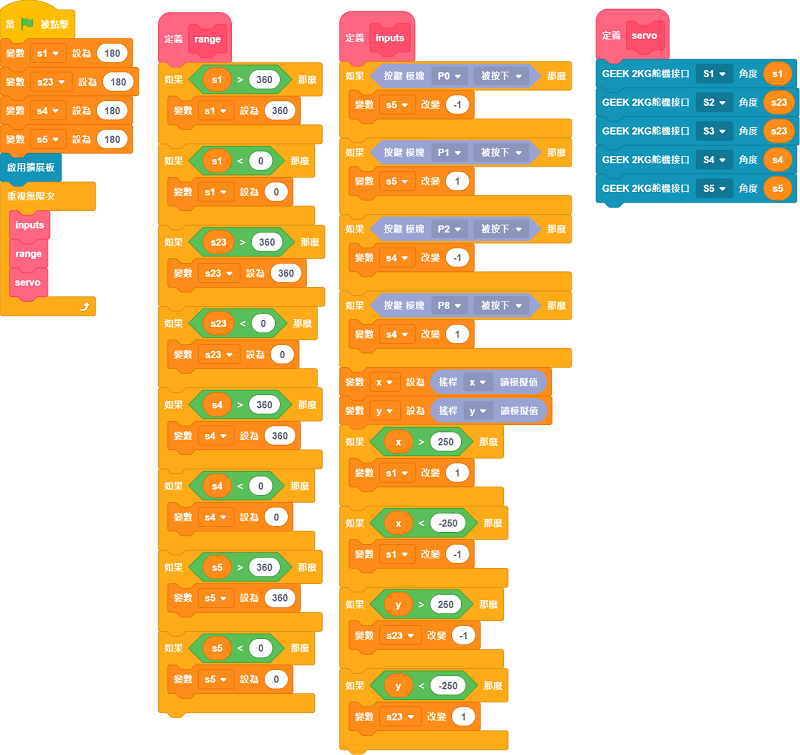
參考程式
Micro:bit參考程式
插件版本與更新
插件可能會不定時推出更新,改進功能。亦有時候我們可能需要轉用舊版插件才可使用某些功能。
詳情請參考: Makecode插件版本更換
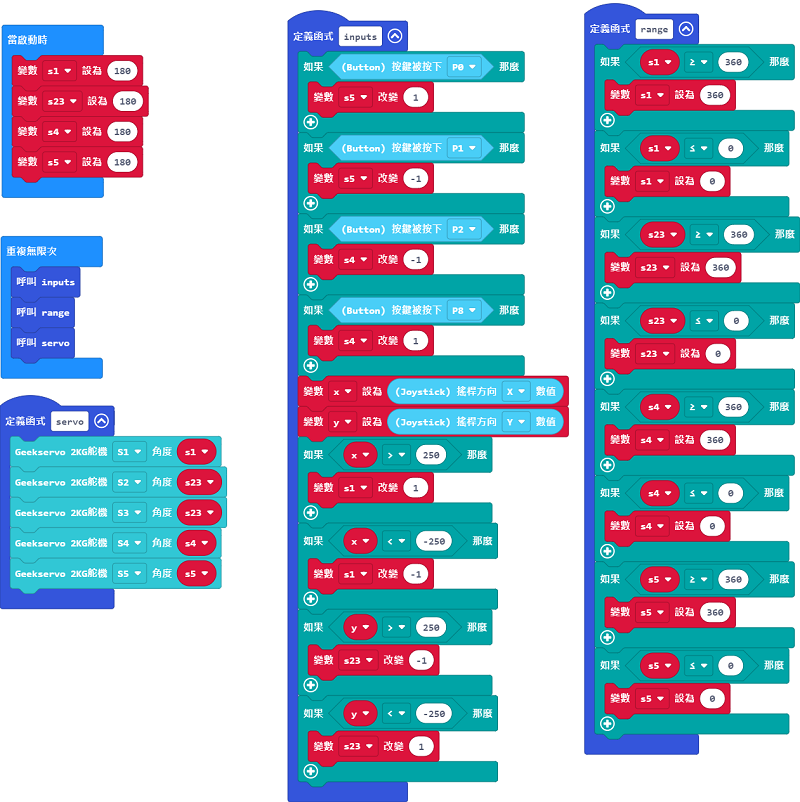
未來板參考程式
KittenBlock參考程式
Python參考程式
#/bin/python
from future import *
from sugar import *
import robotbit
x = 0
s1 = 0
s23 = 0
s4 = 0
s5 = 0
y = 0
def inputs():
global x,s1,s23,s4,s5,y
if Button("P1").value() == 0:
s5 += -1
if Button("P0").value() == 0:
s5 += 1
if Button("P2").value() == 0:
s4 += -1
if Button("P8").value() == 0:
s4 += 1
x = Joystick().value('x')
y = Joystick().value('y')
if x > 250:
s1 += 1
if x < -250:
s1 += -1
if y > 250:
s23 += -1
if y < -250:
s23 += 1
def range():
global x,s1,s23,s4,s5,y
if s1 > 360:
s1 = 360
if s1 < 0:
s1 = 0
if s23 > 360:
s23 = 360
if s23 < 0:
s23 = 0
if s4 > 360:
s4 = 360
if s4 < 0:
s4 = 0
if s5 > 360:
s5 = 360
if s5 < 0:
s5 = 0
def servo():
global x,s1,s23,s4,s5,y
robot.geekServo2kg(1, s1)
robot.geekServo2kg(2, s23)
robot.geekServo2kg(3, s23)
robot.geekServo2kg(4, s4)
robot.geekServo2kg(5, s5)
s1 = 180
s23 = 180
s4 = 180
s5 = 180
robot = robotbit.RobotBit()
while True:
inputs()
range()
servo()
示範短片
